Yitong Lu and Anuruddha Bhattacharjee and Conlan C. Taylor and Julien Leclerc and Jason M. O'Kane and MinJun Kim and Aaron T. Becker
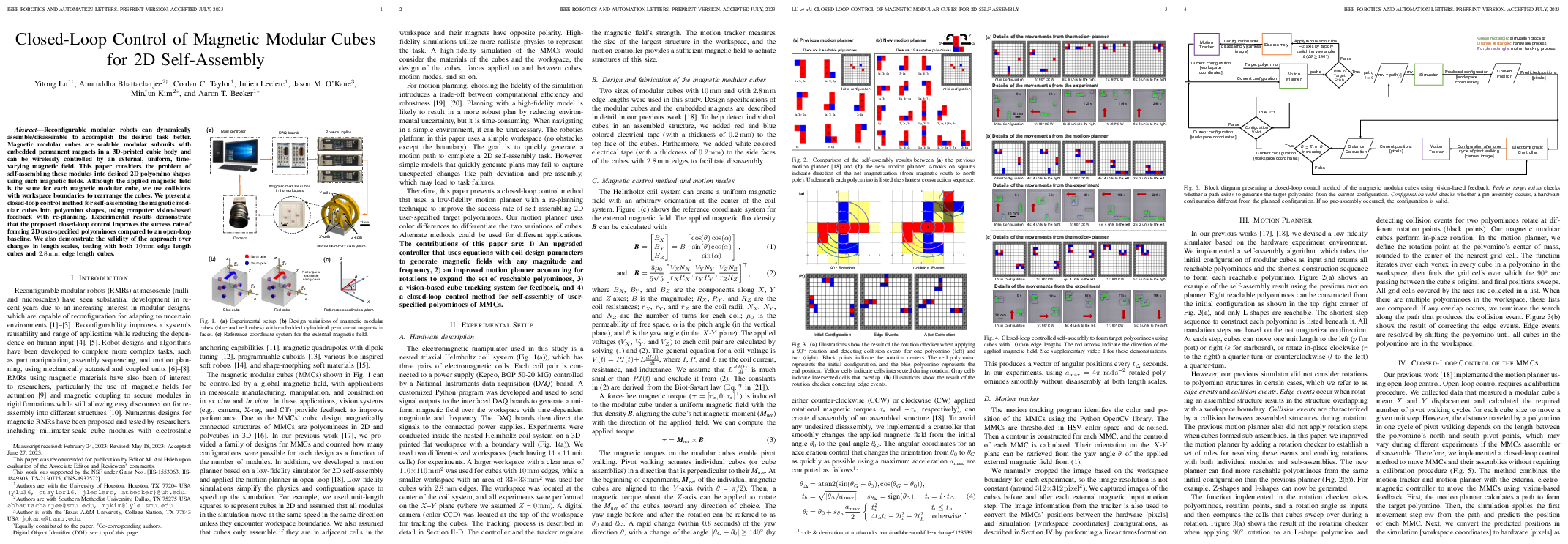
Yitong Lu and Anuruddha Bhattacharjee and Conlan C. Taylor and Julien Leclerc and Jason M. O'Kane and MinJun Kim and Aaron T. BeckerAbstract Reconfigurable modular robots can dynamically assemble/disassemble to accomplish the desired task better. Magnetic modular cubes are scalable modular subunits with embedded permanent magnets in a 3D-printed cubic body and can be wirelessly controlled by an external, uniform, time-varying magnetic field. This paper considers the problem of self-assembling these modules into desired 2D polyomino shapes using such magnetic fields. Although the applied magnetic field is the same for each magnetic modular cube, we use collisions with workspace boundaries to rearrange the cubes. We present a closed-loop control method for self-assembling the magnetic modular cubes into polyomino shapes, using computer vision-based feedback with re-planning. Experimental results demonstrate that the proposed closed-loop control improves the success rate of forming 2D user-specified polyominoes compared to an open-loop baseline. We also demonstrate the validity of the approach over changes in length scales, testing with both 10 mm edge length cubes and 2.8 mm edge length cubes.
@article{LuBha+23,
author = {Yitong Lu and Anuruddha Bhattacharjee and Conlan C. Taylor
and Julien Leclerc and Jason M. O'Kane and
MinJun Kim and Aaron T. Becker},
doi = {10.1109/LRA.2023.3296008},
journal = {IEEE Robotics and Automation Letters},
month = {September},
number = {9},
pages = {5998--6005},
title = {Closed-Loop Control of Magnetic Modular Cubes for 2D Self-
Assembly},
volume = {8},
year = {2023}
}